
珠海博成自动化科技有限公司
电话:0756-2262158
传真:0756-2262158
联系人 :李先生
手机:15812791025
详细地址:广东省珠海市金湾区红旗镇南翔路2号A栋
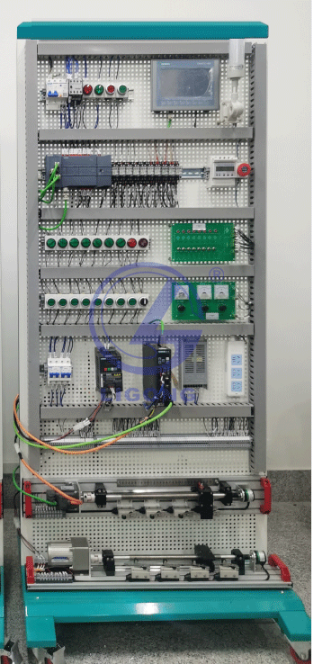
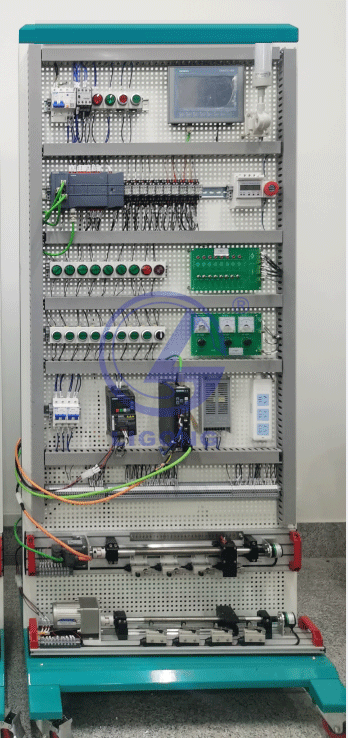
PLC直线运动控制组合实训台BCLG-JNT01A型
一、技术指标
1、采用铝合金框架与网孔板组合成立式实训展板结构形式,有脚轮。
2、实训台尺寸为1800 mm(高)×800 mm(宽)×465 mm(底座深)。
3、实训台上安装西门子1200电控系统和二种机械模型。
4、电气控制实训板上主要硬件有:空气开关、变频器、伺服驱动器、电源保护及操作按钮和指示灯、PLC、触摸屏、24VDC 50W开关电源、模拟量输出驱动调压模块等控制器件。
5、控制系统主要器件为西门子品牌,采用前面板配线。
6、电气控制系统可对二种实物模型分别进行控制。配有接线原理图。
7、异步电机直线运动模型可实现交流电机变频调速控制、位置控制、转速控制。
8、伺服电机直线运动模型可实现交流伺服电机调速控制、位置控制、转速控制。
9、网孔板上的器件可灵活安装、拆卸、组合、扩展,是学生进行机电一体化实训的基础平台。
10、电气控制实训板上,安装西门子1214C PLC主机及模拟量信号板,具有PROFINET接口,具有16路数字量输入,8路晶体管输出, 1路模拟量输出;另配置ET200S,数字量 8入8出。
11、触摸屏选用西门子KTP700,7寸,具有PROFINET接口。
12、变频器选用西门子品牌V20系列0.37KW变频器。
13、交流伺服驱动器及伺服电机选用雷赛品牌L7系列。
14、物联网远程模块,支持对PLC远程上下载程序、远程监控,手机APP监控等。
15、每套设备通过交换机以太网通讯。
16、多套设备之间通过以太网通讯。
二、工艺设计
1、实训台为开放式工业电气柜结构形式,工艺贴近工程实际,拆装电气元件和机械模型灵活方便。
2、装配台为立式展板式,有脚轮,移动方便。
3、实训台使用单相220V电源,功率小于500W。
4、实训台另外需配置电脑桌和计算机,供编程使用,用户自备。
5、实训台上的电源控制是按照工业电气柜中的电源控制功能制作,具有方便的可操作性、可指示性,并安装来电指示灯和运行指示灯,作为用电状态指示,提供直流24V开关电源,为PLC回路及触摸屏提供工作电源。
6、实训台上PLC、继电器、空气开关等元件可以在已安装的U型导轨上直接固定或拆卸,触摸屏可通过相配套的支架安装。按钮指示灯等可通过支撑板进行固定安装。
7、实训台电路布线采用前面板式,有行线槽,电线采用国标0.5~1.0平方BVR软线。
8、机械模型,可以方便在实训台上拆装。
三、器件配置
序号 | 名称 | 品牌型号 | 数量 |
1
| 实训台底座及展板 | 用于安装器件及模型 | 1 |
PLC | 西门子1214C主机,自带Profinet接口 ,16路数字量输入,8路数字量输出;配置1路模拟量输出;配置ET200S, 8入8出 | 1 | |
触摸屏 | 西门子KTP700,7寸彩色PN口 | 1 | |
交换机 | 西门子5口 | 1 | |
变频器 | V20系列 0.37KW | 1 | |
伺服驱动器 | AC220V 200W | 1 | |
物联网模块 | 4G | 1 | |
电气控制元件 | 空开、接触器、指示灯、插接端子、按钮支架、报警灯、电缆电线等 | 1 | |
2 | 异步电机直线运动模型 | LGBJ-M01A | 1 |
3 | 伺服电机直线运动模型 | LGSF-M01A | 1 |
4 | 开关量基础板 | 按钮、开关、指示灯 | 1 |
5 | 模拟量基础板 | 电位器、电压表 | 1 |
6 | 工业控制成套仿真软件和资源包 | 包含1套博图V17 PLC编程软件,1套PLC控制编程仿真软件,1套工业自动化控制实训系统,1套电气控制技能实训仿真软件 | 1 |
7 | 云智能实验室安全管理系统 | 本平台将无线传输、信息处理等物联网技术应用用于自动化远程控制。设备端运行状态、数据参数等上传至云平台。物联网系统的传感层、传输层和应用层关联掌握数据与分析数据,整个实训室配置一套管理系统。
★投标文件里提供(1)-(9)项内容相符的系统截图或照片。 ★为避免可能产生的产权纠纷需提供相关软件证书扫描件,原件备查。 | 1 |
8 | 电脑桌 | 型材:600*600*780mm | 1 |
9 | 台式电脑(自配) | (i7-12700 16G 256G固态+1T)+23英寸 | 1 |
五、异步电机直线运动模型技术指标
1、异步电机直线运动模型外观
2、异步电机直线运动模型技术说明:
(1)异步电机直线运动模型由三相交流减速异步电机、联轴器、轴承、丝杠、丝母(运动滑块)、支架、旋转编码器等组成,固定在金属底板上。
(2)三相交流减速异步电动机,15W,三相交流220V,速比1:3,可由变频器进行速度调节。
(3)滑块运动有效行程300mm。终端有机械保护。
(4)位置检测器件具有行程开关4个、旋转编码器1个(1000P/R)。
(5)通过位置检测元件和电机调速,可对运动滑块进行位置和速度控制,能模仿工厂中许多设备的工作情况,实验内容极其丰富。
(6)异步电机直线运动模型外形尺寸:700 mm(长)×180 mm(宽)×150 mm(高)。3、异步电机直线运动模型实验题目:
(1)位置检测实验
实验一:行程开关位置检测控制实验
实验二:旋转编码器位置速度检测控制实验
(2)综合应用实验
实验一:龙门刨工作台自动往返速度控制实验
实验二:多工步机床动力头进给速度控制实验
实验三:汽车顶盖龙门式单面双点焊接设备位置速度控制实验
实验四:铝合金自动锯下料设备位置控制实验
实验五:立体仓库堆垛机行走方向相对认址技术控制实验
4、异步电机直线运动模型变频器实验题目:
实验一 面板操作实验
实验二 端子操作实验
实验三 启停速度选择实验
实验四 多段速度选择实验
实验五 自由停止与直流制动实验
实验六 电位器输入与模拟监控实验
六、伺服直线运动模型技术指标
1、伺服直线运动模型外观
2、伺服电机直线运动模型技术说明:
(1)伺服电机直线运动模型由交流伺服电机、联轴器、轴承、丝杠、丝母(运动滑块)、支架、旋转编码器等组成,固定在金属底板上。
(2)伺服电机,额定功率:200W,额定转矩:0.64N/m,单相交流220V,额定转速:3000r/min,额定电流:1.6A.。
(3)滑块运动有效行程300mm。终端有机械保护。
(4)位置检测器件具有旋转编码器1个(1000P/R)。
(5)通过位置检测元件和电机调速,可对运动滑块进行位置和速度控制,能模仿工厂中许多设备的工作情况,实验内容极其丰富。
(6)伺服电机直线运动模型外形尺寸:700 mm(长)×180 mm(宽)×150 mm(高)。
七、软件及课件资源
1、博图V17 PLC编程软件、MCGS
2、PLC控制编程仿真软件
1)软件特点:
(1)软件以PLC为原型,实现基本指令、应用指令以及顺序控制指令的仿真模拟。
(2)软件通过实训要求,了解实训目的和控制要求。
(3)实训器件采用三维仿真实物组件,让学生了解控制实验中所需的元件。
(4)通过器件库,学生可进行器件布局,对各控制回路进行模拟接线。
(5)通过I/O分配布置,将鼠标移到I/O分配地址资源相应部分能查看到相对应的实物。
(6)通过符号库,选择正确的符号放置有T型图正确位置,实现接线仿真。
(7)在原理图中进行模拟仿真连接电路,按步骤连接正确后才能进行下一条的接线操作。
(8)接线完成实现通电运行,通过鼠标进行上电运行,软件会以动画形式进行动作演示。
2)软件仿真项目
(1)双面铣床控制
(2)工业洗衣机控制
(3)皮带运输线控制
(4)电镀生产线控制
(5)运料小车控制
(6)音乐喷泉控制
(7)简易机械手控制
(8)大小球传送装置控制
(9)循环彩灯控制
(10)停车场车位控制
(11)小推车控制
(12)三层电梯控制
(13)电动机启停控制
(14)电动机正反转控制
(15)电动机循环正反转控制
(16)可逆运行反接制动控制
(17)三速电机控制
(18)星角降压启动控制
(19)数码管点亮控制
(20)交通灯控制
(21)恒压供水系统控制
★投标时提供提供不少于十张的软件截图,并提供软件正版佐证复印件原件备查,如PLC控制编程仿真软件著作权证书。
3、工业自动化控制实训系统
通过本系统软件了解组成智能制造生产线的电气、气动、PLC等元件的工作原理并对机电系统的设计、分析进行虚拟仿真。通过选择元件利用符合绘制二维回路图或利用三维模型在系统内实现智能制造的动作而进行虚拟仿真。本系统不仅实现工厂的三维仿真使虚拟现实仿真更加逼真,而且把通过仿真验证的控制逻辑单元可用作监视及控制模块,使能够实现并行工程及软件、硬件的并行设计。
仿真基本模块包括:
(1)反馈控制和顺序控制系统
(2)指示灯的与门(AND)控制
(3)物品传送装置
(4)单向气缸控制
(5)双缸联动控制
(6)带式输送装置系统
(7)滚筒式输送装置系统
(8)指示灯顺序闪烁回路
(9)自动控制标记打印操作控制
(10)电梯控制
(11)气压控制移动装置
(12)工业机器人控制
(13)带式传送带实习装置
(14)气压传动流水线实验装置
★投标时提供提供不少于十张的软件截图,并提供软件正版佐证复印件原件备查,如工业自动化控制实训系统软件著作权证书。
5、电气控制技能实训仿真软件
应适用于电气控制及电工培训,仿真软件应收集有电拖专业里最基础、最重要的18种电路,电动机反接制动控制电路、三相电动机机械制动控制电路、时间继电器自动控制电动机Y-Δ降压起动电路、接触器自动控制电动机Y-Δ降压起动电路、自耦补偿控制的电动机降压起动控制电路、生产机械行程控制电路、双重联锁电动机可逆控制电路、有过载保护的电动机单向运转电气控制电路、直流电动机的正反转控制电路、直流电动机的制动控制电路、直流电动机调速控制电路、钻床电气控制电路、平面磨床控制电路、车床电气控制电路、绕线式电动机运转控制电路、电动葫芦控制电路、接触器控制的双速电动机调速电路、能耗制控制电路。每种线路分为元件结构、原理分析、实际接线、课堂练习四大模块。软件还包括安全用电常识,常用电工工具,常用导线连接,手工焊接工艺等;电工仪表:包括万能表,电能表,钳型电流表,直流电桥,配电板等;电机与变压器:包括三相异步电动机,单机异步电动机,伺服电机,步进电机,直流电机等;低压电器;包括交流接触器:继电器,低压断路器,熔断器,起动器,主令电器等;照明电路安装:包括荧光灯,两地控制灯。软件形式上有多媒体演示动画课件和自学型交互课件,视频部分在大型的一流企业实景拍摄,所使用的设备与工艺流程,皆为生产车间现在正在使用的生产技术。情景模拟软件支持多媒体播放,让你切身实际的感受仪器的使用方法、注意事项,能够身临其境地感受到操作仪器的逼真效果。
★投标时并提供软件正版佐证复印件原件备查,如电气控制技能实训仿真软件著作权证书。
6、电气教学课件资源
为方便教学,提供课件资源必须不得少于15个课时的教学课件,内容生产丰富,采用动画演示,带实物图片、电路图等。投标时现场演示内容。
内容包括:
(1)三相交流电路:三相电压、负载星形联结的三相电路、负载三角形联结的三相电路、三相功率;
(2)磁路与变压器:磁路的基本概念与基本定律、交流铁心线圈电路、电磁铁、变压器;
(3)交流电动机:三相交流异步电动机的构造、三相交流异步电动机的转动原理、三相交流异步电动机的电磁转矩与机械特性、三相交流异步电动机的启动、反转、调速和制动、三相交流异步电动机的铭牌数据、三相交流异步电动机的选择;
(4)继电接触器控制:常用控制电器、鼠笼式电动机的启动控制、鼠笼式电动机的正反转和行程控制、多台鼠笼式电动机的顺序控制、鼠笼式电动机的制动控制;
(5)工厂供电系统基础知识:工厂供电系统基础知识、电力系统的电压、衡量电能质量的主要指标、安全用电、
(6)电路的基本概念与基本定律:电路的基本物理量、电压源与电流源、电阻元件与欧姆定律、电感元件与电容元件、电源有载工作、开路与短路、基尔霍夫定律、电路中电位的概念及计算、电阻电路的分析方法;
(7)一阶电路的暂态分析:电阻串并联联接的等效变换、电源两种模型的等效变换、支路电流法、结点电压法、叠加原理、等效电源定理;
(8)一阶电路的暂态分析:一阶电路和换路定律、一阶RC电路的响应、一阶电路的三要素法分析法、一阶RL电路的响应;
(9)正弦交流电路的分析:正弦量的三要素、正弦量的相量表示、单一电路元件的交流电路分析、RLC串联的交流电路分析、复杂正弦交流电路分析、功率因数的提高、谐振电路;
(10)半导体器件:半导体基础知识、二极管、特殊二极管、双极型晶体管;
(11)基本放大电路:共射极放大电路的直流通路、共射极放大电路的交流通路、静态工作点稳定、放大电路的频率特性、射极输出器、差分放大器、互补对称功率放大电路、场效应管及其放大电路;
(12)集成运算放大器应用:集成电路与运算放大器介绍、集成运放的应用、集成运算放大器在信号处理方面的应用、集成电压比较器;
(13)直流稳压电源:整流电路、滤波电路、集成稳压器;
(14)基本门电路和组合逻辑电路:数字电路概述、逻辑门电路、TTL门电路、逻辑代数、组合逻辑电路的分析和设计、常用组合逻辑电路、组合逻辑电路应用实例;
(15)触发器与时序逻辑电路:触发器、时序逻辑电路、施密特触发器、单稳态触发器与555定时器电路、555定时器及其应用。
▲投标时提供1-15项内容不少于10张的截图。
7、PLC教学课件资源
(1)PLC的认知:PLC简介、PLC工作原理及运行模式、PLC特点、PLC扩展功能、PLC应用技术人才培养;
(2)软件的使用:软件开发平台、集成软件简介、入门实例;
(3)实训项目示范:八路抢答器编程、三相异步电机的星三角降压启动、运料小车往返控制、十字路口交通灯的控制、电动机组的启停控制、HMI控制液体混合、变频器的电机控制。
(4)小型自动化生产线的设计:该系统具有产品的搬运、检测和传输分拣功能,整个系统由送料单元、机械手搬运单元、步进电机多点定位输送单元和传送带输送分拣单元等组成。具体的项目设计要求如下:
1)本设计的要求使用通过触摸屏与控制台按钮操作,控制生产线的自动运行。生产线通电以后,系统自行检测初始状态是否满足运行条件,如不满足则自行复位或手动调整,若满足则触摸屏显示准备就绪;
2)在准备就绪的情况下,按下启动按钮,生产线开始按顺序运行,供料单元开始工作,电机驱动转盘将工件送到物料台上;电机运行10秒后,若物料台光电开关没有检测到物料,说明已没有物料,开始报警;若检测到物料,则一号搬运机械手开始动作;
3)物料台有料,一号机械手臂伸出并下降夹取工件,夹取到工件后机械手上升缩回并旋转到右侧限位;然后机械手伸出下降将工件放到步进电机输送单元的供料台上,一号搬运机械手恢复到初始状态,等待下一次运行;
4)当步进电机输送单元传感器检测到供料台工件后,步进电机前往高度检测单元进行检测;到达后通过超声波传感器进行高度检测,检测完毕后;步进电机运行到二号搬运机械手位置;
5)到达二号搬运机械手位置后;二号搬运机械手伸出、爪夹取工件,机架台上升,旋转到右限位,伸出手臂,机架台下降,手爪放松,将工件放到传送带上,同时二号搬运机械手复位;
6)当传送带单元传感器检测到工件时,传送带开始工作,根据工件的颜色、材料进行分拣;分拣结束后,供料台回到供料位置,等待下一次运行。
★投标时提供以上(1)-(4)项内容不少于十张的软件截图。